S rychlým vývojem elektrických vozidel (EV) se optimalizace účinnosti motoru stala klíčovým faktorem pro prodloužení dojezdu, snížení spotřeby energie a zlepšení celkového výkonu vozidla. Jednou z kritických komponent, které přispívají k této optimalizaci, je Variabilní reluktanční resolver (VR resolver) . Tento snímač hraje zásadní roli při přesné detekci polohy rotoru, umožňuje přesné řízení motoru a zlepšení účinnosti.
V tomto článku prozkoumáme účel VR resolveru v EV hnacích motorech, jak zvyšuje účinnost elektromotoru, klíčové faktory, které je třeba vzít v úvahu při výběru vhodného VR resolveru, a další zásadní aspekty. Pochopení významu rozlišovačů proměnné reluktance v moderních systémech EV může inženýrům a výrobcům pomoci činit informovaná rozhodnutí pro optimalizaci výkonu a účinnosti.
Jaký je účel Resolveru v hnacím motoru EV?
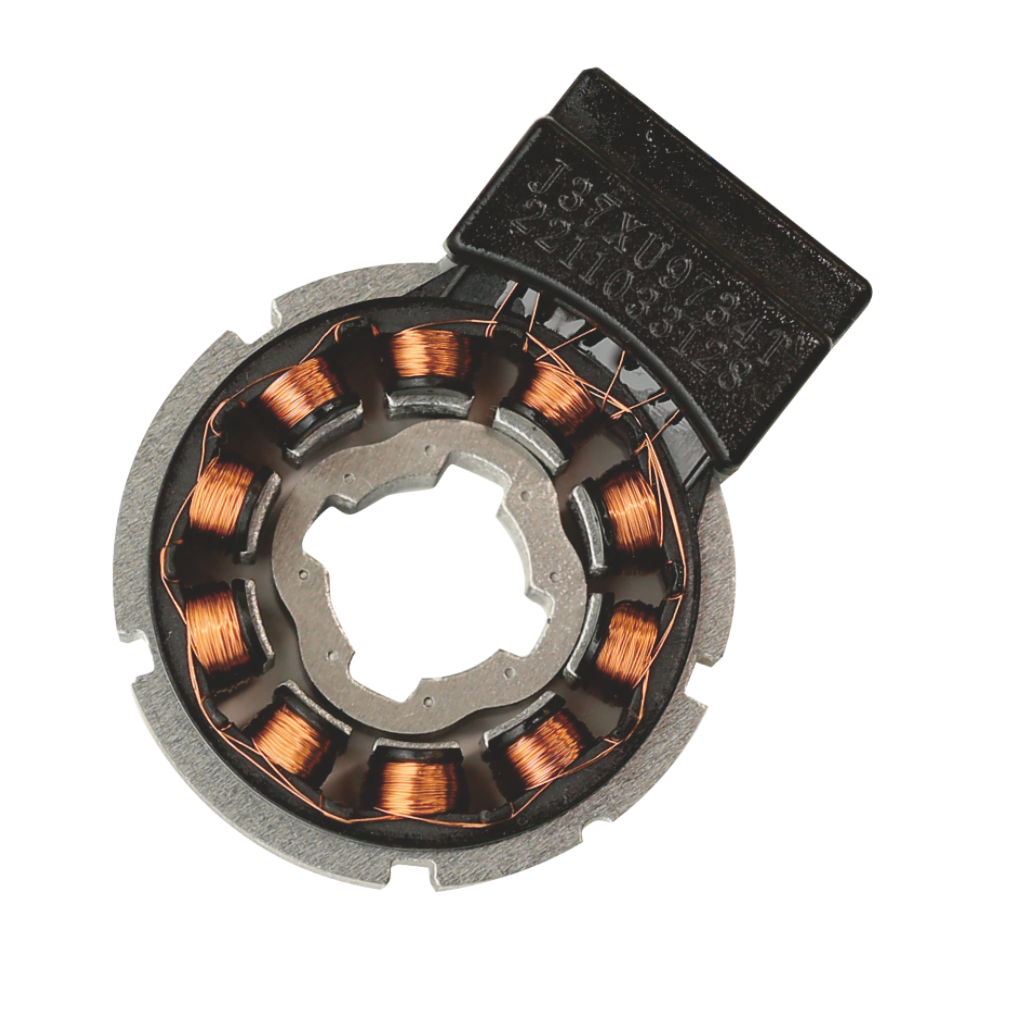
Resolver je elektromechanický senzor používaný k určení polohy rotujícího hřídele, který se běžně vyskytuje v elektromotorech, včetně těch, které se používají v EV. VR resolver je specifickým typem resolveru, který funguje na základě změn magnetické reluktance. Je široce používán v automobilových aplikacích díky své robustnosti, vysoké přesnosti a spolehlivosti v extrémních podmínkách.
Klíčové funkce Resolveru v EV motorech
Detekce polohy rotoru
Primární funkcí VR resolveru je poskytovat zpětnou vazbu o poloze rotoru v reálném čase. Tyto informace jsou nezbytné pro přesné řízení chodu motoru, zajišťující hladký průběh točivého momentu a optimalizovanou energetickou účinnost.
Snímání rychlosti
Kromě detekce polohy poskytují rozkladače s proměnnou reluktancí také zpětnou vazbu o rychlosti. Tyto údaje jsou klíčové pro udržení stabilního chodu motoru a přizpůsobení výkonu na základě jízdních podmínek.
Usnadnění řízení orientovaného na pole (FOC)
Moderní elektromotory v EV využívají řízení orientované na pole (FOC), které se spoléhá na údaje o poloze rotoru. Resolver VR zajišťuje, že ovladač motoru může přesně určit orientaci magnetického pole, což vede k lepšímu řízení točivého momentu a snížení energetických ztrát.
Zlepšení spolehlivosti motoru
Na rozdíl od některých jiných snímačů polohy jsou VR resolvery odolné vůči nepříznivým vlivům prostředí, jako jsou extrémní teploty, vibrace a elektromagnetické rušení. Díky této odolnosti jsou ideální pro automobilové aplikace, kde je spolehlivost prvořadá.
Jak VR Resolver přispívá k účinnosti elektromotoru?
Účinnost elektromotoru je přímo ovlivněna přesností a spolehlivostí systému detekce polohy rotoru. Překladač s proměnnou reluktancí hraje klíčovou roli při optimalizaci výkonu motoru tím, že zajišťuje přesné řízení funkcí motoru. Zde je návod, jak přispívá k účinnosti elektromotoru:
1. Vysoká přesnost detekce polohy rotoru
Rozkladač VR poskytuje vysoce přesné údaje o poloze rotoru, což umožňuje ovladači motoru optimalizovat dodávku energie. To zajišťuje, že motor pracuje s maximální účinností, snižuje energetické ztráty a zlepšuje celkový výkon.
2. Snížení energetických ztrát
Účinnost motoru je výrazně ovlivněna energetickými ztrátami v důsledku nepřesného snímání polohy. Tradiční kodéry a snímače s Hallovým jevem mohou způsobit chyby, což vede ke zvýšené spotřebě energie. Na druhou stranu rozlišovače s proměnnou reluktancí mají minimální chybové rozpětí, čímž zabraňují zbytečnému plýtvání energií a zlepšují účinnost.
3. Optimalizované řízení točivého momentu
U elektromotorů je přesné řízení točivého momentu zásadní pro plynulé zrychlování a zpomalování. Rozkladač VR zajišťuje, že ovladač motoru přijímá v reálném čase a přesné údaje o poloze rotoru, což usnadňuje optimální řízení točivého momentu. Výsledkem je snížená spotřeba energie a lepší zážitek z jízdy.
4. Robustní výkon v extrémních podmínkách
Reluktanční resolver je vysoce odolný vůči změnám teploty, elektromagnetickému rušení a mechanickým vibracím. Na rozdíl od optických kodérů, které mohou selhat v náročných prostředích, si rozkladače VR zachovávají přesný výkon a zajišťují konzistentní účinnost motoru v průběhu času.
5. Podporuje vysokorychlostní provoz motoru
Mnoho moderních EV motorů pracuje při vysokých rychlostech a vyžaduje přesné snímání polohy, aby byla zachována účinnost. VR resolver je schopen přesně detekovat polohu rotoru i při vysokých otáčkách, což z něj činí preferovanou volbu pro vysoce výkonné EV motory.
6. Integrace s pokročilými systémy řízení motoru
Moderní elektromobily spoléhají na sofistikované algoritmy řízení motoru, jako je vektorové řízení a řízení orientované na pole (FOC), aby maximalizovaly účinnost. Překladač s proměnnou reluktancí se hladce integruje s těmito systémy a poskytuje zpětnou vazbu v reálném čase, která zvyšuje přesnost řízení motoru a snižuje energetické ztráty.
Jak vybrat vhodný motorový Resolver?
Výběr správného resolveru pro hnací motor EV je zásadní pro maximalizaci účinnosti, spolehlivosti a výkonu. Zde je několik klíčových faktorů, které je třeba vzít v úvahu při výběru VR resolveru:
1. Přesnost a rozlišení
Vysoká přesnost zajišťuje přesnou detekci polohy rotoru, což vede k lepšímu ovládání motoru.
Rozlišení by mělo být dostatečné pro splnění provozních požadavků motoru, typicky v rozsahu 10-16 bitů pro vysoce výkonné aplikace.
2. Rozsah provozní rychlosti
Resolver VR by měl podporovat plný rozsah otáček motoru a zajistit přesnou zpětnou vazbu polohy i při vysokých otáčkách.
Hledejte resolvery se širokou frekvenční odezvou, aby vyhovovaly různým provozním podmínkám.
3. Odolnost vůči životnímu prostředí
Rozkladače s proměnnou reluktancí by měly být schopny odolat extrémním teplotám, vibracím a elektromagnetickému rušení.
Rozkladače pro automobilový průmysl jsou navrženy tak, aby fungovaly v drsných podmínkách, takže jsou ideální pro aplikace EV.
4. Kompatibilita s ovladači motoru
Ujistěte se, že je resolver VR kompatibilní s rozhraním ovladače motoru a podporuje požadované algoritmy zpracování signálu.
Některé ovladače mohou vyžadovat další úpravu signálu, takže před výběrem by měla být ověřena kompatibilita.
5. Odolnost a životnost
Protože EV motory pracují v náročných podmínkách, měl by mít VR resolver dlouhou životnost s minimálními nároky na údržbu.
Hledejte produkty s prokázanou spolehlivostí v automobilových aplikacích.
6. Kompromis mezi cenou a výkonem
Zatímco špičkové rozkladače s proměnnou reluktancí nabízejí vynikající přesnost a odolnost, mohou být dražší.
Při výběru nejvhodnějšího resolveru zvažte kompromis mezi výkonem a rozpočtovými omezeními.
Srovnávací tabulka: optického kodéru vs. VR Resolver
| Funkce |
Optický kodér |
VR Resolver |
| Přesnost |
Vysoký |
Vysoký |
| Odolnost vůči životnímu prostředí |
Nízký |
Vysoký |
| Náklady |
Drahý |
Cenově dostupnější |
| Rozsah provozní rychlosti |
Mírný |
Široký rozsah |
| Trvanlivost |
Mírný |
Vysoký |
| Vhodnost pro EV motory |
Omezený |
Vynikající |
Závěr
The Variabilní reluktanční resolver hraje klíčovou roli při optimalizaci účinnosti elektromotoru tím, že poskytuje přesnou zpětnou vazbu polohy rotoru, minimalizuje energetické ztráty a zlepšuje řízení točivého momentu. Ve srovnání s jinými snímači polohy nabízejí VR resolvery vynikající spolehlivost, odolnost a výkon v extrémních podmínkách, což z nich dělá ideální volbu pro EV aplikace.
Výběr správného překladače VR zahrnuje zvážení faktorů, jako je přesnost, rozsah rychlostí, odolnost vůči okolnímu prostředí a kompatibilita s ovladači motoru. Výběrem vysoce kvalitního resolveru mohou výrobci elektromobilů zlepšit efektivitu vozidla, prodloužit životnost baterie a zlepšit celkový jízdní výkon.
Nejčastější dotazy
1. Co je to proměnný reluktanční resolver?
Rozkladač s proměnnou reluktancí (VR resolver) je snímač polohy, který detekuje polohu rotoru elektromotoru na základě změn magnetické reluktance. Je široce používán v EV motorech pro svou vysokou přesnost a spolehlivost.
2. Jak VR resolver zlepšuje účinnost motoru?
Resolver VR poskytuje přesnou zpětnou vazbu polohy rotoru, což umožňuje ovladači motoru optimalizovat dodávku výkonu, snížit energetické ztráty a zlepšit řízení točivého momentu, což vede k vyšší účinnosti.
3. Jaké jsou výhody použití VR resolveru v EV motoru?
Vysoká přesnost detekce polohy rotoru
Robustní výkon v extrémních podmínkách
Vylepšená regulace točivého momentu a energetická účinnost
Dlouhá životnost s minimální údržbou
4. Jak si stojí VR resolver ve srovnání s optickým kodérem?
Zatímco optické kodéry nabízejí vysokou přesnost, jsou méně odolné v drsném prostředí. Resolver VR poskytuje srovnatelnou přesnost s vynikající robustností, takže je lepší volbou pro automobilové aplikace.
5. Jaké faktory je třeba vzít v úvahu při výběru VR resolveru?
Mezi klíčové faktory patří přesnost, rozsah provozních rychlostí, odolnost vůči okolnímu prostředí, životnost, kompatibilita s ovladači motoru a hospodárnost.








