ตัวรีโซลเวอร์รีโซลเวอร์แบบแปรผันมีส่วนช่วยเพิ่มประสิทธิภาพมอเตอร์ไฟฟ้าอย่างไร
การเข้าชม: 0 ผู้แต่ง: บรรณาธิการเว็บไซต์ เวลาเผยแพร่: 2025-03-06 ที่มา: เว็บไซต์
สอบถาม
ด้วยการพัฒนาอย่างรวดเร็วของรถยนต์ไฟฟ้า (EV) การเพิ่มประสิทธิภาพมอเตอร์จึงกลายเป็นปัจจัยสำคัญในการขยายระยะการขับขี่ ลดการใช้พลังงาน และปรับปรุงสมรรถนะโดยรวมของยานพาหนะ องค์ประกอบสำคัญประการหนึ่งที่มีส่วนช่วยในการเพิ่มประสิทธิภาพนี้คือ ตัว ความไม่เต็มใจแบบแปรผัน (ตัวแก้ไข VR) แก้ไข เซ็นเซอร์นี้มีบทบาทสำคัญในการตรวจจับตำแหน่งโรเตอร์อย่างแม่นยำ ช่วยให้สามารถควบคุมมอเตอร์ได้อย่างแม่นยำและปรับปรุงประสิทธิภาพ
ในบทความนี้ เราจะสำรวจวัตถุประสงค์ของรีโซลเวอร์ VR ในมอเตอร์ขับเคลื่อน EV วิธีที่จะเพิ่มประสิทธิภาพของมอเตอร์ไฟฟ้า ปัจจัยสำคัญที่ต้องพิจารณาเมื่อเลือกรีโซลเวอร์มอเตอร์ที่เหมาะสม และประเด็นสำคัญอื่นๆ การทำความเข้าใจถึงความสำคัญของตัวแก้ไขความไม่เต็มใจแบบแปรผันในระบบ EV สมัยใหม่สามารถช่วยให้วิศวกรและผู้ผลิตตัดสินใจอย่างมีข้อมูลเพื่อเพิ่มประสิทธิภาพและประสิทธิผลได้
จุดประสงค์ของรีโซลเวอร์ในมอเตอร์ขับเคลื่อน EV คืออะไร
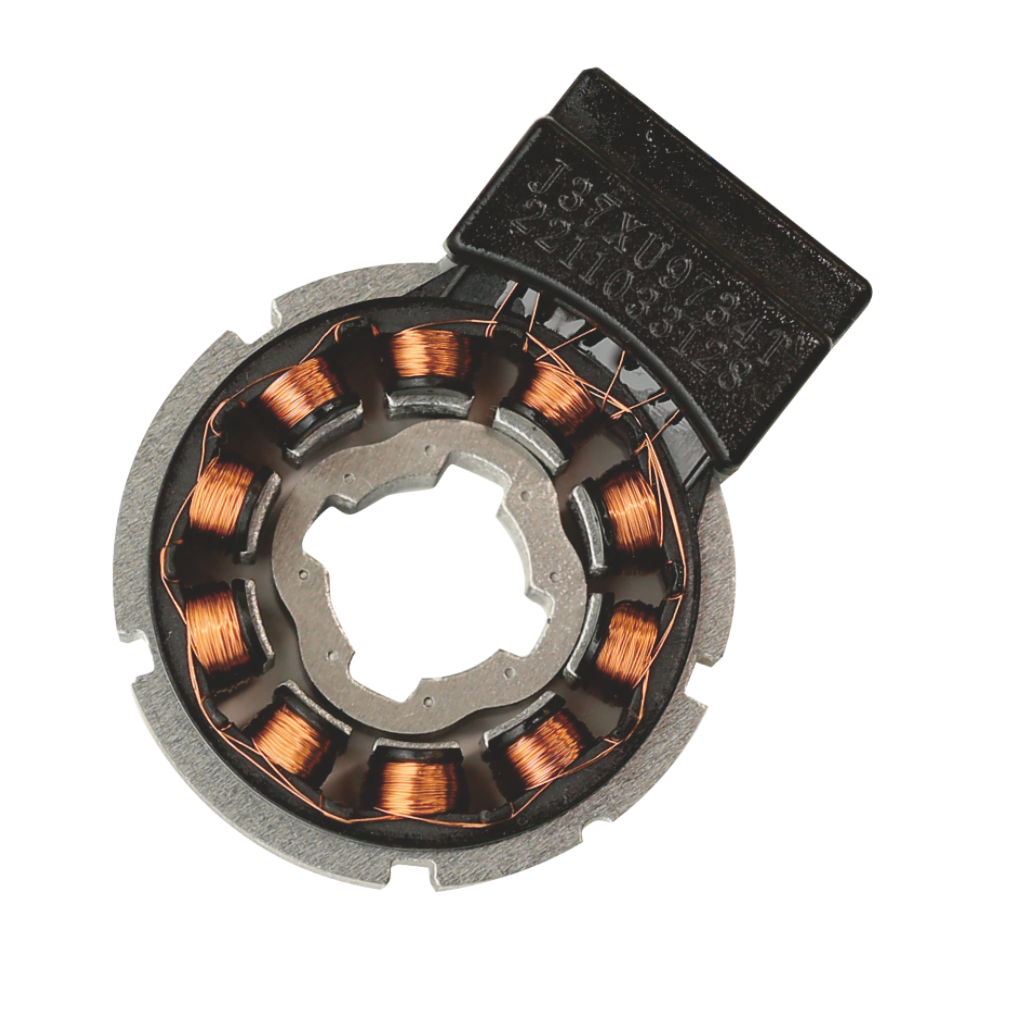
รีโซลเวอร์คือเซ็นเซอร์ระบบเครื่องกลไฟฟ้าที่ใช้ในการระบุตำแหน่งของเพลาหมุน ซึ่งมักพบในมอเตอร์ไฟฟ้า รวมถึงที่ใช้ใน EV ด้วย ตัวแก้ไข VR คือตัวแก้ไขประเภทเฉพาะที่ทำงานตามการเปลี่ยนแปลงของการฝืนแม่เหล็ก มีการใช้กันอย่างแพร่หลายในการใช้งานด้านยานยนต์เนื่องจากมีความทนทาน ความแม่นยำสูง และความน่าเชื่อถือภายใต้สภาวะที่รุนแรง
หน้าที่สำคัญของรีโซลเวอร์ในมอเตอร์ไฟฟ้า
การตรวจจับตำแหน่งโรเตอร์
หน้าที่หลักของรีโซลเวอร์ VR คือการให้ข้อเสนอแนะแบบเรียลไทม์เกี่ยวกับตำแหน่งของโรเตอร์ ข้อมูลนี้จำเป็นสำหรับการควบคุมการทำงานของมอเตอร์อย่างแม่นยำ ช่วยให้มั่นใจได้ถึงการส่งแรงบิดที่ราบรื่นและประสิทธิภาพการใช้พลังงานที่เหมาะสมที่สุด
การตรวจจับความเร็ว
นอกเหนือจากการตรวจจับตำแหน่งแล้ว ตัวแก้ไขฝืนแบบแปรผันยังให้การตอบสนองความเร็วอีกด้วย ข้อมูลนี้มีความสำคัญอย่างยิ่งต่อการรักษาเสถียรภาพการทำงานของมอเตอร์และการปรับกำลังขับตามสภาพการขับขี่
การอำนวยความสะดวกในการควบคุมเชิงสนาม (FOC)
มอเตอร์ไฟฟ้าสมัยใหม่ใน EV ใช้การควบคุมเชิงสนาม (FOC) ซึ่งอาศัยข้อมูลตำแหน่งของโรเตอร์ ตัวรีโซลเวอร์ VR ช่วยให้มั่นใจได้ว่าตัวควบคุมมอเตอร์สามารถกำหนดการวางแนวของสนามแม่เหล็กได้อย่างแม่นยำ ซึ่งนำไปสู่การควบคุมแรงบิดที่ดีขึ้นและลดการสูญเสียพลังงาน
การเพิ่มความน่าเชื่อถือของมอเตอร์
แตกต่างจากเซ็นเซอร์ตำแหน่งอื่นๆ ตัวรีโซลเวอร์ VR ทนทานต่อปัจจัยแวดล้อมที่รุนแรง เช่น อุณหภูมิที่สูงเกินไป การสั่นสะเทือน และการรบกวนทางแม่เหล็กไฟฟ้า ความยืดหยุ่นนี้ทำให้เหมาะสำหรับการใช้งานด้านยานยนต์ที่ความน่าเชื่อถือเป็นสิ่งสำคัญยิ่ง
ตัวแก้ไข VR มีส่วนช่วยเพิ่มประสิทธิภาพมอเตอร์ไฟฟ้าอย่างไร
ประสิทธิภาพของมอเตอร์ไฟฟ้าได้รับอิทธิพลโดยตรงจากความแม่นยำและความน่าเชื่อถือของระบบตรวจจับตำแหน่งโรเตอร์ ตัวแก้ไขฝืนแบบแปรผันมีบทบาทสำคัญในการปรับประสิทธิภาพของมอเตอร์ให้เหมาะสมโดยรับประกันการควบคุมฟังก์ชันของมอเตอร์อย่างแม่นยำ สิ่งเหล่านี้มีส่วนทำให้มอเตอร์ไฟฟ้ามีประสิทธิภาพดังนี้:
1. ความแม่นยำสูงในการตรวจจับตำแหน่งโรเตอร์
ตัวรีโซลเวอร์ VR ให้ข้อมูลตำแหน่งโรเตอร์ที่มีความแม่นยำสูง ซึ่งช่วยให้ตัวควบคุมมอเตอร์เพิ่มประสิทธิภาพการส่งกำลังได้ ช่วยให้มั่นใจได้ว่ามอเตอร์จะทำงานได้อย่างมีประสิทธิภาพสูงสุด ลดการสูญเสียพลังงาน และปรับปรุงประสิทธิภาพโดยรวม
2. การลดการสูญเสียพลังงาน
ประสิทธิภาพของมอเตอร์ได้รับผลกระทบอย่างมากจากการสูญเสียพลังงานเนื่องจากการตรวจจับตำแหน่งที่ไม่ถูกต้อง ตัวเข้ารหัสแบบเดิมและเซนเซอร์ฮอลล์เอฟเฟกต์อาจทำให้เกิดข้อผิดพลาด ส่งผลให้สิ้นเปลืองพลังงานมากขึ้น ในทางกลับกัน ตัวแก้ไขฝืนแบบแปรผันจะมีข้อผิดพลาดน้อยที่สุด ป้องกันการสิ้นเปลืองพลังงานโดยไม่จำเป็นและปรับปรุงประสิทธิภาพ
3. การควบคุมแรงบิดที่ปรับให้เหมาะสม
ในมอเตอร์ไฟฟ้า การควบคุมแรงบิดที่แม่นยำถือเป็นสิ่งสำคัญเพื่อการเร่งความเร็วและลดความเร็วที่ราบรื่น ตัวรีโซลเวอร์ VR ช่วยให้มั่นใจได้ว่าตัวควบคุมมอเตอร์จะได้รับข้อมูลตำแหน่งโรเตอร์แบบเรียลไทม์และแม่นยำ ช่วยให้การจัดการแรงบิดเหมาะสมที่สุด ส่งผลให้สิ้นเปลืองพลังงานน้อยลงและเพิ่มประสบการณ์การขับขี่
4. ประสิทธิภาพที่แข็งแกร่งภายใต้สภาวะที่รุนแรง
ตัวแก้ไขฝืนแบบแปรผันมีความทนทานสูงต่อการเปลี่ยนแปลงของอุณหภูมิ การรบกวนทางแม่เหล็กไฟฟ้า และการสั่นสะเทือนทางกล ต่างจากตัวเข้ารหัสแบบออปติคอลซึ่งอาจทำงานล้มเหลวในสภาพแวดล้อมที่รุนแรง ตัวรีโซลเวอร์ VR จะรักษาประสิทธิภาพที่แม่นยำ เพื่อให้มั่นใจถึงประสิทธิภาพของมอเตอร์ที่สม่ำเสมอเมื่อเวลาผ่านไป
5. รองรับการทำงานของมอเตอร์ความเร็วสูง
มอเตอร์ EV สมัยใหม่จำนวนมากทำงานที่ความเร็วสูง โดยต้องมีการตรวจจับตำแหน่งที่แม่นยำเพื่อรักษาประสิทธิภาพ ตัวรีโซลเวอร์ VR สามารถตรวจจับตำแหน่งโรเตอร์ได้อย่างแม่นยำแม้ที่ RPM สูง ทำให้เป็นตัวเลือกที่ต้องการสำหรับมอเตอร์ EV ประสิทธิภาพสูง
6. บูรณาการกับระบบควบคุมมอเตอร์ขั้นสูง
รถยนต์ไฟฟ้าสมัยใหม่อาศัยอัลกอริธึมการควบคุมมอเตอร์ที่ซับซ้อน เช่น การควบคุมเวกเตอร์และการควบคุมเชิงสนาม (FOC) เพื่อเพิ่มประสิทธิภาพสูงสุด ตัวแก้ไขฝืนแบบแปรผันจะทำงานร่วมกับระบบเหล่านี้ได้อย่างราบรื่น โดยให้ผลตอบรับแบบเรียลไทม์ซึ่งช่วยเพิ่มความแม่นยำในการควบคุมมอเตอร์และลดการสูญเสียพลังงาน
จะเลือกตัวรีโซลเวอร์มอเตอร์ที่เหมาะสมได้อย่างไร
การเลือกรีโซลเวอร์ที่เหมาะสมสำหรับมอเตอร์ขับเคลื่อน EV ถือเป็นสิ่งสำคัญในการเพิ่มประสิทธิภาพ ความน่าเชื่อถือ และประสิทธิภาพสูงสุด ต่อไปนี้เป็นปัจจัยสำคัญบางประการที่ควรพิจารณาเมื่อเลือกตัวแก้ไข VR:
1. ความแม่นยำและความละเอียด
ความแม่นยำสูงทำให้การตรวจจับตำแหน่งโรเตอร์แม่นยำ ส่งผลให้การควบคุมมอเตอร์ดีขึ้น
ความละเอียดควรเพียงพอที่จะตอบสนองความต้องการในการปฏิบัติงานของมอเตอร์ โดยทั่วไปจะอยู่ในช่วง 10-16 บิตสำหรับการใช้งานที่มีประสิทธิภาพสูง
2. ช่วงความเร็วการทำงาน
3. ความต้านทานต่อสิ่งแวดล้อม
4. ความเข้ากันได้กับตัวควบคุมมอเตอร์
ตรวจสอบให้แน่ใจว่ารีโซลเวอร์ VR เข้ากันได้กับอินเทอร์เฟซของตัวควบคุมมอเตอร์ และรองรับอัลกอริธึมการประมวลผลสัญญาณที่จำเป็น
คอนโทรลเลอร์บางตัวอาจต้องมีการปรับสภาพสัญญาณเพิ่มเติม ดังนั้นควรตรวจสอบความเข้ากันได้ก่อนเลือก
5. ความทนทานและอายุยืนยาว
เนื่องจากมอเตอร์ EV ทำงานภายใต้สภาวะที่มีความต้องการสูง ตัวรีโซลเวอร์ VR ควรมีอายุการใช้งานยาวนานและมีความต้องการการบำรุงรักษาน้อยที่สุด
มองหาผลิตภัณฑ์ที่มีประวัติความน่าเชื่อถือในการใช้งานด้านยานยนต์ที่ได้รับการพิสูจน์แล้ว
6. ต้นทุนเทียบกับการแลกเปลี่ยนประสิทธิภาพ
แม้ว่าตัวแก้ไขฝืนของตัวแปรระดับไฮเอนด์จะให้ความแม่นยำและความทนทานที่เหนือกว่า แต่ก็อาจมีต้นทุนที่สูงกว่า
พิจารณาข้อดีข้อเสียระหว่างข้อจำกัดด้านประสิทธิภาพและงบประมาณเมื่อเลือกรีโซลเวอร์ที่เหมาะสมที่สุด
ตารางเปรียบเทียบ:
| คุณสมบัติ ตัวเข้ารหัสแบบออปติคัลกับตัวแก้ไข VR |
ตัวเข้ารหัสแบบออปติคัล |
ตัวแก้ไข VR |
| ความแม่นยำ |
สูง |
สูง |
| ความต้านทานต่อสิ่งแวดล้อม |
ต่ำ |
สูง |
| ค่าใช้จ่าย |
แพง |
ราคาไม่แพงมากขึ้น |
| ช่วงความเร็วการทำงาน |
ปานกลาง |
ช่วงกว้าง |
| ความทนทาน |
ปานกลาง |
สูง |
| ความเหมาะสมสำหรับมอเตอร์ EV |
จำกัด |
ยอดเยี่ยม |
บทสรุป
ที่ ตัวแก้ไขฝืนแบบแปรผัน มีบทบาทสำคัญในการเพิ่มประสิทธิภาพมอเตอร์ไฟฟ้าโดยการป้อนกลับตำแหน่งโรเตอร์ที่แม่นยำ ลดการสูญเสียพลังงาน และเพิ่มการควบคุมแรงบิด เมื่อเปรียบเทียบกับเซ็นเซอร์ตำแหน่งอื่นๆ ตัวรีโซลเวอร์ VR ให้ความน่าเชื่อถือ ความทนทาน และประสิทธิภาพที่เหนือกว่าภายใต้สภาวะที่รุนแรง ทำให้เป็นตัวเลือกที่เหมาะสำหรับการใช้งาน EV
การเลือกรีโซลเวอร์ VR ที่เหมาะสมเกี่ยวข้องกับการพิจารณาปัจจัยต่างๆ เช่น ความแม่นยำ ช่วงความเร็ว ความต้านทานต่อสภาพแวดล้อม และความเข้ากันได้กับตัวควบคุมมอเตอร์ ด้วยการเลือกรีโซลเวอร์คุณภาพสูง ผู้ผลิต EV สามารถปรับปรุงประสิทธิภาพของยานพาหนะ ยืดอายุแบตเตอรี่ และเพิ่มประสิทธิภาพการขับขี่โดยรวมได้
คำถามที่พบบ่อย
1. ตัวแก้ไขฝืนของตัวแปรคืออะไร?
ตัวแก้ไขฝืนแบบแปรผัน (ตัวแก้ไข VR) คือเซ็นเซอร์ตำแหน่งที่ตรวจจับตำแหน่งโรเตอร์ของมอเตอร์ไฟฟ้าตามการเปลี่ยนแปลงของการฝืนแม่เหล็ก มีการใช้กันอย่างแพร่หลายในมอเตอร์ EV เนื่องจากมีความแม่นยำและความน่าเชื่อถือสูง
2. ตัวแก้ไข VR ช่วยปรับปรุงประสิทธิภาพของมอเตอร์ได้อย่างไร
รีโซลเวอร์ VR ให้การตอบสนองตำแหน่งโรเตอร์ที่แม่นยำ ช่วยให้ตัวควบคุมมอเตอร์เพิ่มประสิทธิภาพการส่งกำลัง ลดการสูญเสียพลังงาน และปรับปรุงการควบคุมแรงบิด ซึ่งนำไปสู่ประสิทธิภาพที่สูงขึ้น
3. การใช้รีโซลเวอร์ VR ในมอเตอร์ EV มีข้อดีอย่างไร
มีความแม่นยำสูงในการตรวจจับตำแหน่งโรเตอร์
ประสิทธิภาพที่แข็งแกร่งในสภาวะที่รุนแรง
ปรับปรุงการควบคุมแรงบิดและประสิทธิภาพการใช้พลังงาน
อายุการใช้งานยาวนานพร้อมการบำรุงรักษาน้อยที่สุด
4. ตัวแก้ไข VR เปรียบเทียบกับตัวเข้ารหัสแบบออปติคัลอย่างไร
แม้ว่าตัวเข้ารหัสแบบออปติคอลจะมีความแม่นยำสูง แต่ก็มีความทนทานน้อยกว่าในสภาพแวดล้อมที่รุนแรง ตัวแก้ไข VR ให้ความแม่นยำที่เทียบเคียงได้กับความทนทานที่เหนือกว่า ทำให้เป็นตัวเลือกที่ดีกว่าสำหรับการใช้งานในยานยนต์
5. ปัจจัยใดที่ควรพิจารณาเมื่อเลือกรีโซลเวอร์ VR
ปัจจัยสำคัญ ได้แก่ ความแม่นยำ ช่วงความเร็วในการทำงาน ความทนทานต่อสภาพแวดล้อม ความทนทาน ความเข้ากันได้กับตัวควบคุมมอเตอร์ และความคุ้มค่า








