Täppisliikumise süsteemide maailmas on asukoha tuvastamine täpsuse, töökindluse ja tõhususe tagamisel ülioluline komponent. Olgu tegemist robootika, tööstusmasinate või kosmosesüsteemidega, asukoha, kiiruse ja suuna täpne määramine on hädavajalik. Kaks kõige levinumat selleks otstarbeks kasutatavat seadet on lahendajad ja kodeerijad. Kuigi mõlemad täidavad positsiooni tagasiside eesmärki, töötavad nad täiesti erinevatel põhimõtetel ja sobivad erinevate rakenduste jaoks.
mõista lahenduse ja kodeerija erinevust . Rakenduse jaoks õige tehnoloogia valimisel on ülimalt oluline Selles artiklis uurime lahendajad , nende eelised, piirangud ja võrrelge neid kodeerijatega. Lisaks arutame kontekste, kus üks võib olla sobivam kui teine, aidates teil teha oma täppisliikumissüsteemide kohta teadlikke otsuseid.
Mis on lahendajad?
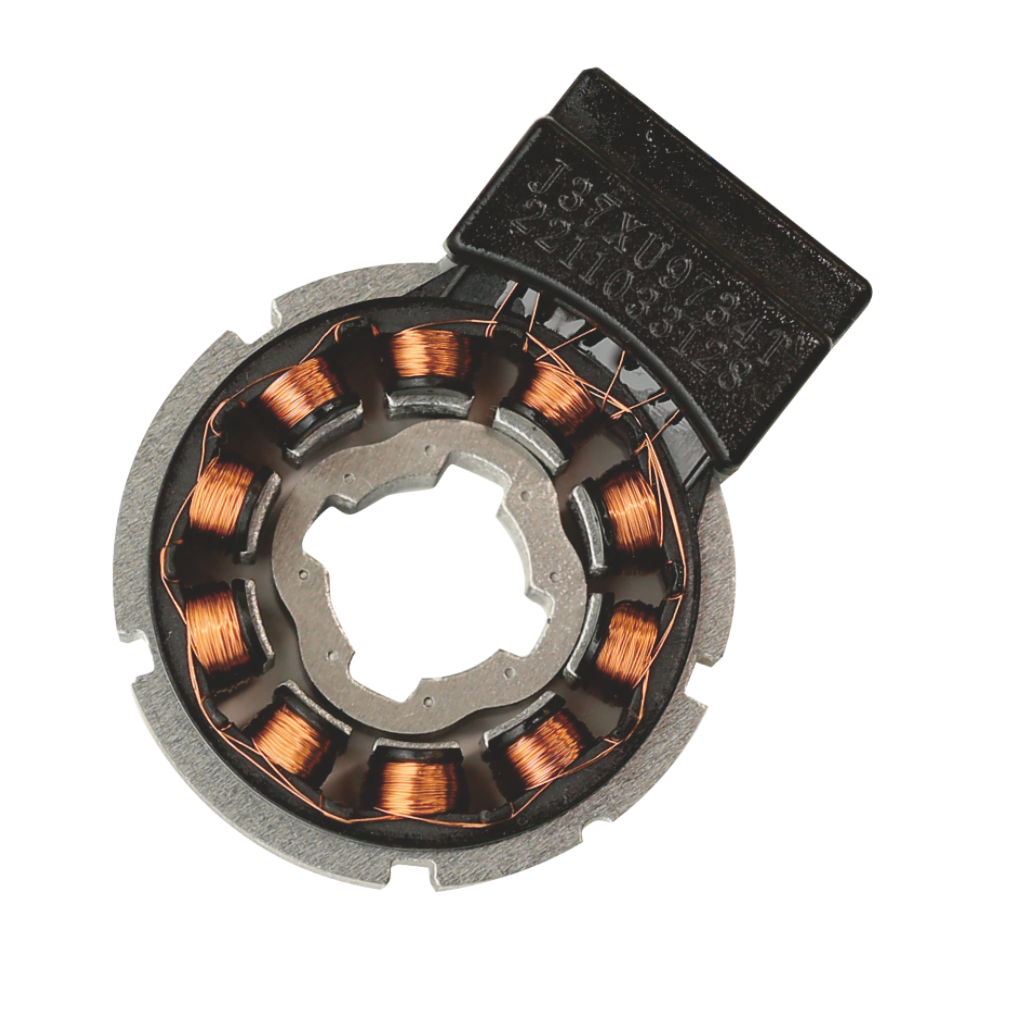
Lahendaja on elektromehaaniline seade , mida kasutatakse nurgaasendi mõõtmiseks. See töötab elektromagnetilise induktsiooni põhimõtteid kasutades. Struktuurselt sarnaneb lahendaja rootori ja staatoriga trafoga. Staator sisaldab mähiseid, mis genereerivad rootori nurgaasendi põhjal siinuslainekujusid. Lahendaja väljastab kaks signaali: siinus ja koosinus, mis vastavad rootori asendile.
Resolverid on absoluutse asendi andurid , mis tähendab, et nad annavad täpset asukoha tagasisidet, ilma et oleks vaja toitetsüklite ajal viidet või lähtestamist. Need on tuntud oma vastupidavuse ja vastupidavuse poolest ning neid kasutatakse sageli karmides keskkondades, nagu lennundus, sõjavägi ja tööstusautomaatika.
Millised on lahendajate kasutamise eelised?
Resolveritel on mitmeid selgeid eeliseid, mis muudavad need konkreetsete rakenduste jaoks ideaalseks:
Kõrge töökindlus karmides keskkondades
Resolverid on väga vastupidavad, vastupidavad äärmuslikele temperatuuridele, põrutustele, vibratsioonile ja saasteainetele, nagu tolm või niiskus. Nende tugev konstruktsioon tagab usaldusväärse jõudluse keerulistes keskkondades, nagu lennundussüsteemid ja välistingimustes kasutatavad tööstusseadmed.
Absoluutse positsiooni tagasiside
Erinevalt inkrementaalkooderitest annavad lahendajad absoluutse asukoha tagasisidet, mis tähendab, et asend säilib ka pärast toitekadu või taaskäivitamist. See välistab vajaduse kodustamisrutiinide või võrdlusmarkerite järele.
Andurelemendis puudub elektroonika
Elektrooniliste komponentide puudumine andurielemendis muudab lahendajad oma olemuselt vastupidavaks elektromagnetilistele häiretele (EMI), mis on kõrge elektrilise müraga keskkondades kriitilise tähtsusega.
Temperatuuritaluvusresolverid
võivad töötada äärmuslikel temperatuuridel, tavaliselt vahemikus -55 °C kuni 150 °C või kõrgem. See muudab need sobivaks selliste rakenduste jaoks nagu kosmosemootorid või tööstuslikud ahjud.
Pika elueaga
resolverite eluiga on kodeerijatega võrreldes palju pikem, peamiselt seetõttu, et neil puuduvad õrnad komponendid, nagu optilised kettad või LED-id, mis aja jooksul kuluvad.
Lihtne ja usaldusväärne disain
Nende trafotaoline disain tagab lihtsuse ja töökindluse, vähendades tõrkepunkte ja hoolduskulusid.
Kas Resolveritel on piiranguid?
Kuigi lahendajad paistavad silma vastupidavuse ja usaldusväärsuse poolest, pole neil ka puudusi:
Madalam täpsus võrreldes kodeerijatega
Resolveritel on tavaliselt madalam eraldusvõime ja täpsus võrreldes kodeerijatega. Rakenduste jaoks, mis nõuavad täpset mikropositsioneerimist, võivad kodeerijad olla parem valik.
Kompleksne signaalitöötlus
Lahusti genereeritud siinus- ja koosinussignaalid vajavad andmete töötlemiseks spetsiaalset varustust, näiteks resolver-digitaalmuundurit (RDC). See muudab süsteemi keerukamaks ja kallimaks.
Kõrgemad signaalitöötluse kulud
Kuigi lahendaja ise on sageli vastupidavam ja vastupidavam, võib signaalide tõlgendamiseks vajalik lisaelektroonika suurendada rakendamise üldkulusid.
Piiratud kasutusalaga
resolverid sobivad kõige paremini rakendusteks, kus vastupidavus on täpsuse ees. Tööstusharudes, mis nõuavad ülikõrget täpsust (nt pooljuhtide tootmine), ei pruugi lahendajad nõuetele vastata.
Mis on kodeerijad?
Kodeerija . on seade, mis muudab mehaanilise liikumise elektriliseks signaaliks, et määrata asukoht, kiirus või suund Kodeerijaid kasutatakse laialdaselt tööstusautomaatikas, robootikas ja täppisliikumissüsteemides. Neid on kahte peamist tüüpi: inkrementkooderid ja absoluutkoodrid.
Inkrementaalkoodrid
Need koodrid annavad suhtelise asukoha tagasisidet, genereerides võlli pöörlemisel impulsse. Impulsside arv vastab nurknihkele. Inkrementkooderid kaotavad aga asukohateabe, kui toide katkeb.
Absoluutkooderid
Need andurid annavad iga võlli asendi jaoks ainulaadset asendi tagasisidet. Isegi pärast toitekadu säilitavad absoluutkoodrid oma asukohaandmed, mistõttu sobivad need kriitiliste rakenduste jaoks.
Kodeerijad töötavad optiliste, magnetiliste või mahtuvuslike põhimõtete alusel. Kõige levinumad on optilised kodeerijad, mis kasutavad asukohateabe genereerimiseks valgusallikat ja pöörlevat mustritega ketast.
Millised on kodeerijate kasutamise eelised?
Kodeerijad on eelistatud rakendustes, mis nõuavad suurt täpsust ja mitmekülgsust. Nende eelised hõlmavad järgmist:
Kõrge täpsuse ja eraldusvõimega
kodeerijad, eriti optilised tüübid, pakuvad äärmiselt kõrget eraldusvõimet ja täpsust, sageli alla mikronite vahemikus. See muudab need ideaalseks selliste rakenduste jaoks nagu CNC-masinad, robootika ja pooljuhtide tootmine.
Kompaktsed ja kerged
kodeerijad on lahendajatest väiksemad ja kergemad, mistõttu sobivad need rakendustesse, kus ruumipiirangud on muret tekitavad.
Erinevad väljundsuvandid
Kodeerijad võivad pakkuda erinevaid väljundsignaale, näiteks kvadratuur-, jada- või analoogsignaale, pakkudes süsteemi kujundamisel paindlikkust.
Lai valik rakendusi
Kodeerijaid kasutatakse paljudes tööstusharudes, sealhulgas meditsiiniseadmetes, laborite automatiseerimises ja tööstusrobootikas.
Tasuv suuremahuliste rakenduste jaoks
Rakenduste jaoks, mis ei nõua äärmist vastupidavust, on kodeerijad tavaliselt säästlikumad kui lahendajad.
Millised on kodeerijate piirangud?
Vaatamata eelistele on kodeerijatel teatud piirangud:
Vastuvõtlikkus keskkonnateguritele
Kodeerijad, eriti optilised tüübid, on tundlikud tolmu, mustuse, niiskuse ja vibratsiooni suhtes. See võib karmides keskkondades põhjustada vigu või tõrkeid.
Positsiooni kaotus inkrementkooderites
Inkrementkooderid kaotavad oma asukohaandmed, kui toide katkeb, mistõttu on vaja käivitamisel uuesti seadistada. See võib olla puuduseks rakendustes, mis nõuavad pidevat tööd.
Piiratud temperatuurivahemiku
kodeerijatel on lahustitega võrreldes üldiselt kitsam töötemperatuuri vahemik, mistõttu need ei sobi äärmuslikesse tingimustesse.
Lühema elueaga
kodeerijad sisaldavad tundlikke komponente, nagu optilised kettad, LED-id ja andurid, mis võivad aja jooksul kuluda.
Elektromagnetiliste häirete (EMI)
kodeerijad on EMI suhtes vastuvõtlikumad, mis võib mõjutada signaali terviklikkust elektriliselt mürarikkas keskkonnas.
Resolverite ja kodeerijate vahel valimine
Otsustades lahendaja ja kodeerija vahel, on oluline arvestada teie rakenduse erinõuetega. Siin on mõned tegurid, mida hinnata:
| Kriteeriumide |
lahendaja |
kodeerija |
| Keskkond |
Kõrge EMI, äärmuslike temperatuuride või vibratsiooniga karmid keskkonnad |
Puhas, kontrollitud keskkond minimaalsete häiretega |
| Täpsus/eraldusvõime |
Mõõdukas täpsus; madalam eraldusvõime |
Kõrge täpsus; suurem eraldusvõime |
| Vastupidavus |
Äärmiselt vastupidav; pikk eluiga |
Vähem vastupidav; kulumistundlik |
| Signaali töötlemine |
Vajab lisavarustust (RDC) |
Lihtsam signaalitöötlus |
| Maksumus |
Kõrgem rakenduskulu |
Tavaliselt madalamad kulud standardrakenduste jaoks |
| Rakendusala |
Lennundus-, sõja-, rasketööstus |
Tööstusautomaatika, robootika, täppismasinad |
Õige tasakaalu leidmine täppisliikumise süsteemide jaoks
Valik lahendaja ja kodeerija vahel sõltub lõppkokkuvõttes teie rakenduse prioriteetidest. Kui teie süsteem töötab ekstreemsetes tingimustes, kus vastupidavus ja töökindlus on kriitilise tähtsusega, on lahendaja sageli parim valik. Teisest küljest, kui ülima tähtsusega on suur täpsus ja eraldusvõime, on kodeerija parim valik.
Mõlema tehnoloogia hiljutised edusammud on vähendanud lõhet lahendajate ja kodeerijate vahel. Näiteks kasutatakse nüüd elektrisõidukites (EV-des) kaasaegseid lahendajaid, et pakkuda mootorite usaldusväärset asukohatuvastust, samas kui kodeerijaid projekteeritakse keskkonnategurite vastupidavusega.
Lisaks on esile kerkimas hübriidsüsteemid, mis ühendavad mõlema tehnoloogia tugevad küljed, pakkudes mõlemast maailmast parimat. Need süsteemid kasutavad suure täpsuse jaoks kodeerijaid ja tõrke korral varukoopia tagasiside jaoks lahendajaid.
Järeldus
mõistmine Lahendaja ja kodeerija erinevuse on teie rakenduse jaoks õige asukoha tagasiside seadme valimisel ülioluline. Kuigi lahendajad paistavad silma vastupidavuse, töökindluse ja jõudluse poolest karmides keskkondades, kodeerijad säravad ülitäpsete ja kõrge eraldusvõimega rakendustes. Oma süsteemi nõudeid hoolikalt hinnates saate teha teadliku otsuse, mis tagab optimaalse jõudluse ja pikaealisuse.
Mõlemad tehnoloogiad arenevad edasi automatiseerimise, robootika ja muude tööstusharude edusammude tõttu. Olenemata sellest, kas eelistate vastupidavust või täpsust, võib õige valik oluliselt mõjutada teie liikumisjuhtimissüsteemi tõhusust ja töökindlust.
KKK-d
1. Kas lahendajad või kodeerijad on välistingimustes kasutamiseks paremad?
Resolverid sobivad paremini välitingimustes oma vastupidavuse ja vastupidavuse tõttu sellistele keskkonnateguritele nagu niiskus, tolm ja äärmuslikud temperatuurid.
2. Kas lahendaja saab anda kõrge eraldusvõimega tagasisidet?
Resolverid pakuvad üldiselt mõõdukat eraldusvõimet. Kõrget eraldusvõimet nõudvate rakenduste jaoks on kodeerijad parem valik.
3. Millistes tööstusharudes kasutatakse tavaliselt lahendajaid?
Resolvereid kasutatakse sageli kosmose-, sõja-, rasketehnika ja tööstusautomaatika valdkonnas, kus vastupidavus on hädavajalik.
4. Kas kodeerijad on kuluefektiivsemad kui lahendajad?
Kodeerijad on tavaliselt kuluefektiivsemad rakenduste jaoks, mis ei nõua äärmist vastupidavust ega keskkonnakindlust.
5. Kas lahendajaid ja kodeerijaid saab koos kasutada?
Jah, hübriidsüsteemid saavad kasutada mõlemat tehnoloogiat, ühendades lahenduste vastupidavuse ja kodeerijate täpsuse, et suurendada jõudlust.








