پارامترهای اصلی
| مدل |
J37XU9732T |
J37XU9733T |
J37XU9734T |
| جفت قطب |
2 |
3 |
4 |
| ولتاژ ورودی |
AC 7 Vrms |
AC 7 Vrms |
AC 7 Vrms |
| فرکانس ورودی |
10000 هرتز |
10000 هرتز |
10000 هرتز |
| نسبت تبدیل |
0.286 ± 10٪ |
0.286 ± 10٪ |
0.286 ± 10٪ |
| دقت |
≤ ± 60 دقیقه |
≤ ± 40 دقیقه |
≤ ± 30' |
| تغییر فاز |
TBD |
TBD |
-14 درجه ± 5 درجه |
| قدرت دی الکتریک |
AC 500 Vrms 1 ثانیه |
| مقاومت عایق |
250 مگا اهم دقیقه |
| قطر داخلی روتور |
9.52 میلی متر |
9.52 میلی متر |
12 میلی متر |
| سطح مقطع سیم |
0.35 میلی متر مربع |
0.35 میلی متر مربع |
0.35 میلی متر مربع |
| حداکثر سرعت چرخش |
30000 دور در دقیقه |
30000 دور در دقیقه |
30000 دور در دقیقه |
| محدوده دمای عملیاتی |
-40 تا +155 درجه سانتیگراد |
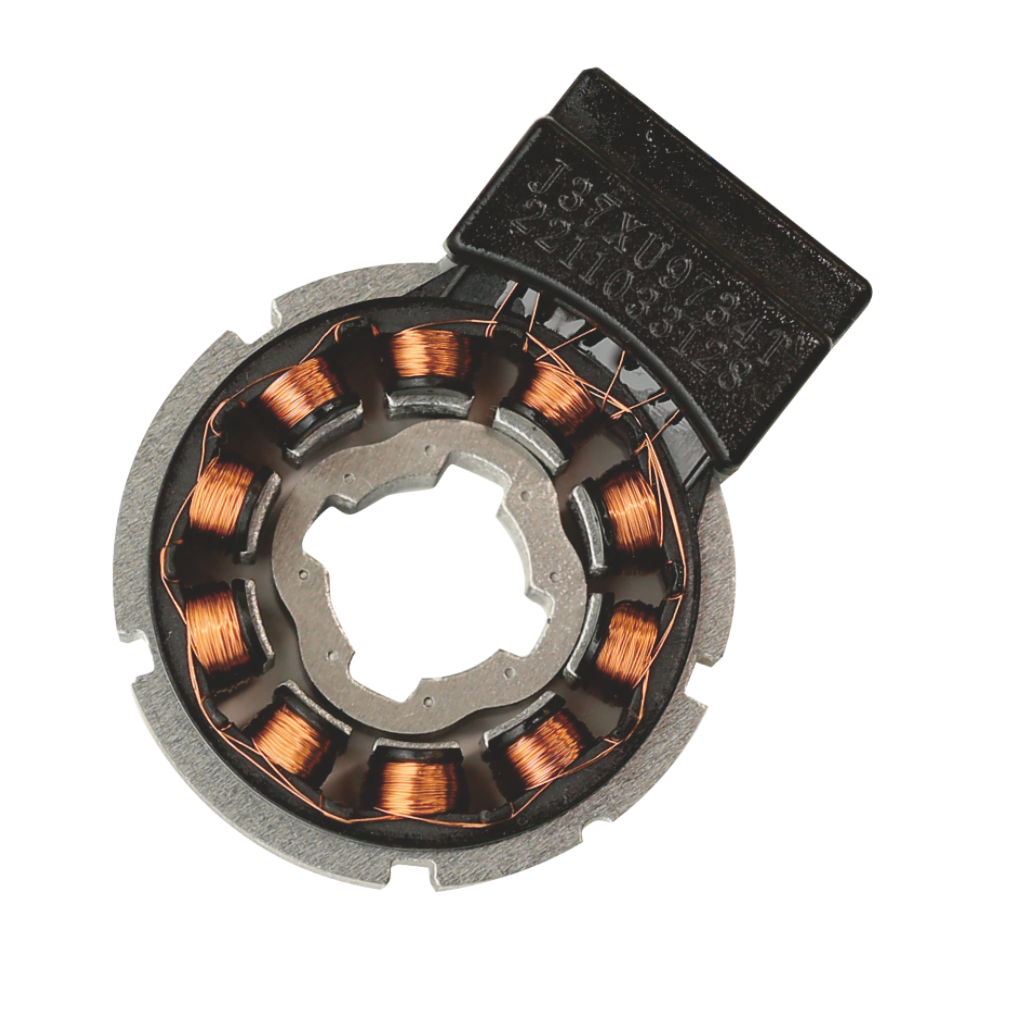
اصل کار
عملکرد حلکننده رلوکتانس متغیر بر اساس تغییرات نفوذپذیری فضایی شکاف هوا با چرخش روتور نسبت به استاتور است. هر چرخه تغییر نفوذپذیری مربوط به چرخش گام روتور است و با هر چرخش چرخه های متعددی رخ می دهد. این تغییرات در نفوذپذیری شکاف هوا منجر به تغییرات در اندوکتانس متقابل بین سیمپیچهای ورودی و خروجی میشود که منجر به تغییرات پتانسیل القایی در سیمپیچ خروجی میشود.
مزایا
بدون نیاز به ترانسفورماتور کوپلینگ، برس یا ساختار تماسی.
ساخت و ساز ساده، کم هزینه و حداقل نیازهای محیطی.
یکپارچه سازی آسان سیستم انتقال را تسهیل می کند.
ایده آل برای کنترل با دقت بالا در موتور و سیستم های CNC.
برنامه های کاربردی
حلکننده رلوکتانس متغیر مخصوصاً برای کاربردهایی که نیاز به سنجش موقعیت زاویهای با دقت بالا دارند، مناسب است. به طور گسترده در موارد زیر استفاده می شود:
فرمان الکترونیکی خودرو (EPS)
وسایل نقلیه برقی
ماشین آلات معدن
سیستم های ریلی پرسرعت