اہم پیرامیٹرز
| ماڈل |
J37XU9732T |
J37XU9733T |
J37XU9734T |
| قطب کے جوڑے |
2 |
3 |
4 |
| ان پٹ وولٹیج |
AC 7 Vrms |
AC 7 Vrms |
AC 7 Vrms |
| ان پٹ فریکوئنسی |
10000 ہرٹج |
10000 ہرٹج |
10000 ہرٹج |
| تبدیلی کا تناسب |
0.286 ±10% |
0.286 ±10% |
0.286 ±10% |
| درستگی |
≤ ±60' |
≤ ±40' |
≤ ±30' |
| فیز شفٹ |
ٹی بی ڈی |
ٹی بی ڈی |
-14° ±5° |
| ڈائی الیکٹرک طاقت |
AC 500 Vrms 1 سیکنڈ |
| موصلیت مزاحمت |
250 MΩ منٹ |
| روٹر اندرونی قطر |
9.52 ملی میٹر |
9.52 ملی میٹر |
12 ملی میٹر |
| وائر کراس سیکشنل ایریا |
0.35 mm² |
0.35 mm² |
0.35 mm² |
| زیادہ سے زیادہ گردشی رفتار |
30000 rpm |
30000 rpm |
30000 rpm |
| آپریٹنگ درجہ حرارت کی حد |
-40℃ سے +155℃ |
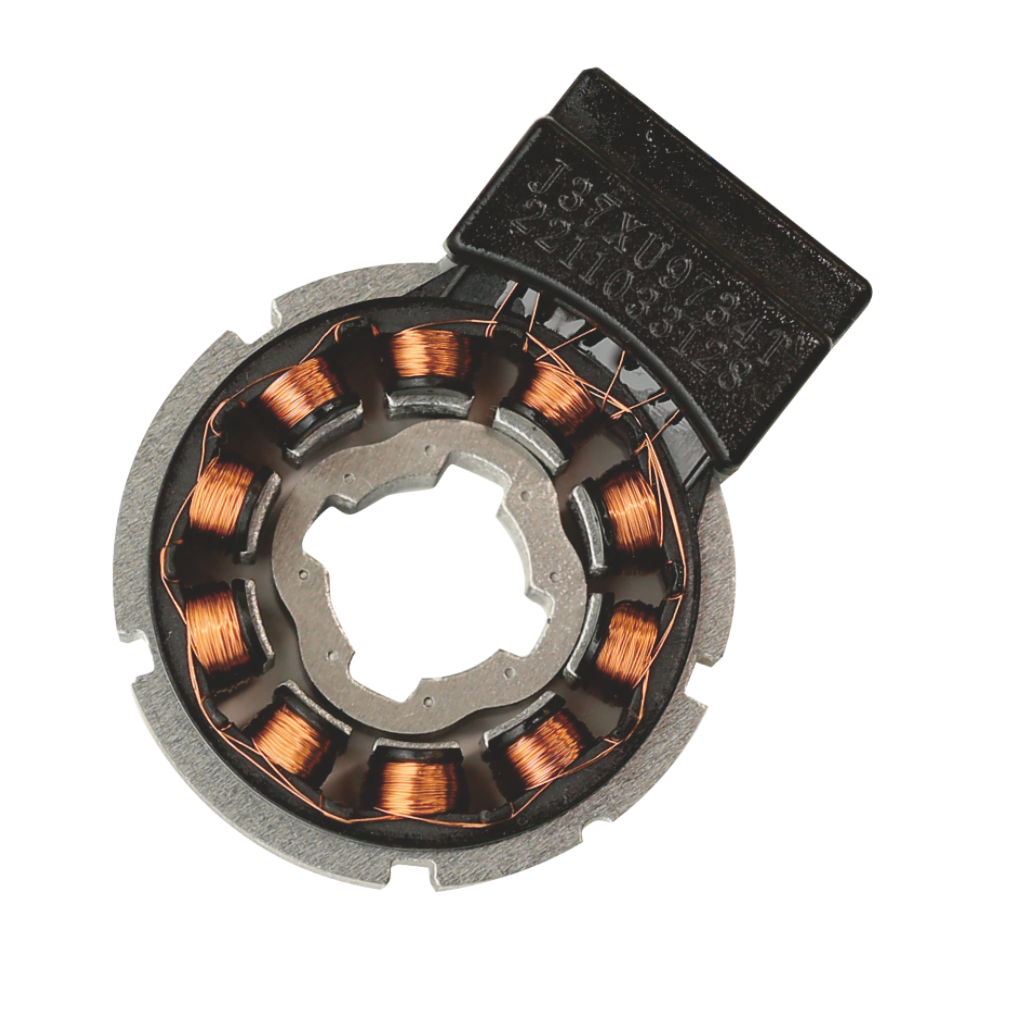
کام کرنے کا اصول
متغیر ہچکچاہٹ حل کرنے والے کا عمل مقامی ایئر گیپ پارگمیتا تبدیلیوں پر مبنی ہوتا ہے کیونکہ روٹر اسٹیٹر کی نسبت گھومتا ہے۔ پارگمیتا کی تبدیلی کا ہر دور روٹر کی پچ گردش سے مساوی ہے، اور ہر ایک انقلاب کے ساتھ متعدد چکر آتے ہیں۔ ایئر گیپ پارگمیبلٹی میں یہ تبدیلیاں ان پٹ اور آؤٹ پٹ وائنڈنگز کے درمیان باہمی انڈکٹنس میں تغیرات کا باعث بنتی ہیں، جس کے نتیجے میں آؤٹ پٹ وائنڈنگ میں ممکنہ تبدیلیاں آتی ہیں۔
فوائد
کوئی کپلنگ ٹرانسفارمر، برش، یا رابطہ ڈھانچہ کی ضرورت نہیں ہے۔
سادہ تعمیر، کم قیمت، اور کم سے کم ماحولیاتی مطالبات۔
ٹرانسمیشن سسٹم کے آسان انضمام کی سہولت فراہم کرتا ہے۔
موٹر اور CNC کے نظام میں اعلی صحت سے متعلق کنٹرول کے لئے مثالی.
درخواستیں
متغیر ہچکچاہٹ حل کرنے والا خاص طور پر ان ایپلی کیشنز کے لیے موزوں ہے جن کے لیے اعلیٰ درستگی والی کونیی پوزیشن سینسنگ کی ضرورت ہوتی ہے۔ یہ وسیع پیمانے پر استعمال کیا جاتا ہے:
آٹوموٹو الیکٹرانک پاور اسٹیئرنگ (EPS)
الیکٹرک گاڑیاں
کان کنی کی مشینری
تیز رفتار ریل سسٹم