Peamised parameetrid
| Mudel |
J37XU9732T |
J37XU9733T |
J37XU9734T |
| Pooluste paarid |
2 |
3 |
4 |
| Sisendpinge |
AC 7 Vrms |
AC 7 Vrms |
AC 7 Vrms |
| Sisendsagedus |
10000 Hz |
10000 Hz |
10000 Hz |
| Ümberkujundamise suhe |
0,286 ±10% |
0,286 ±10% |
0,286 ±10% |
| Täpsus |
≤ ±60' |
≤ ±40' |
≤ ±30' |
| Faasi nihe |
TBD |
TBD |
-14° ±5° |
| Dielektriline tugevus |
AC 500 Vrms 1 s |
| Isolatsioonitakistus |
250 MΩ min |
| Rootori siseläbimõõt |
9,52 mm |
9,52 mm |
12 mm |
| Traadi ristlõikepindala |
0,35 mm² |
0,35 mm² |
0,35 mm² |
| Maksimaalne pöörlemiskiirus |
30000 pööret minutis |
30000 pööret minutis |
30000 pööret minutis |
| Töötemperatuuri vahemik |
-40 ℃ kuni +155 ℃ |
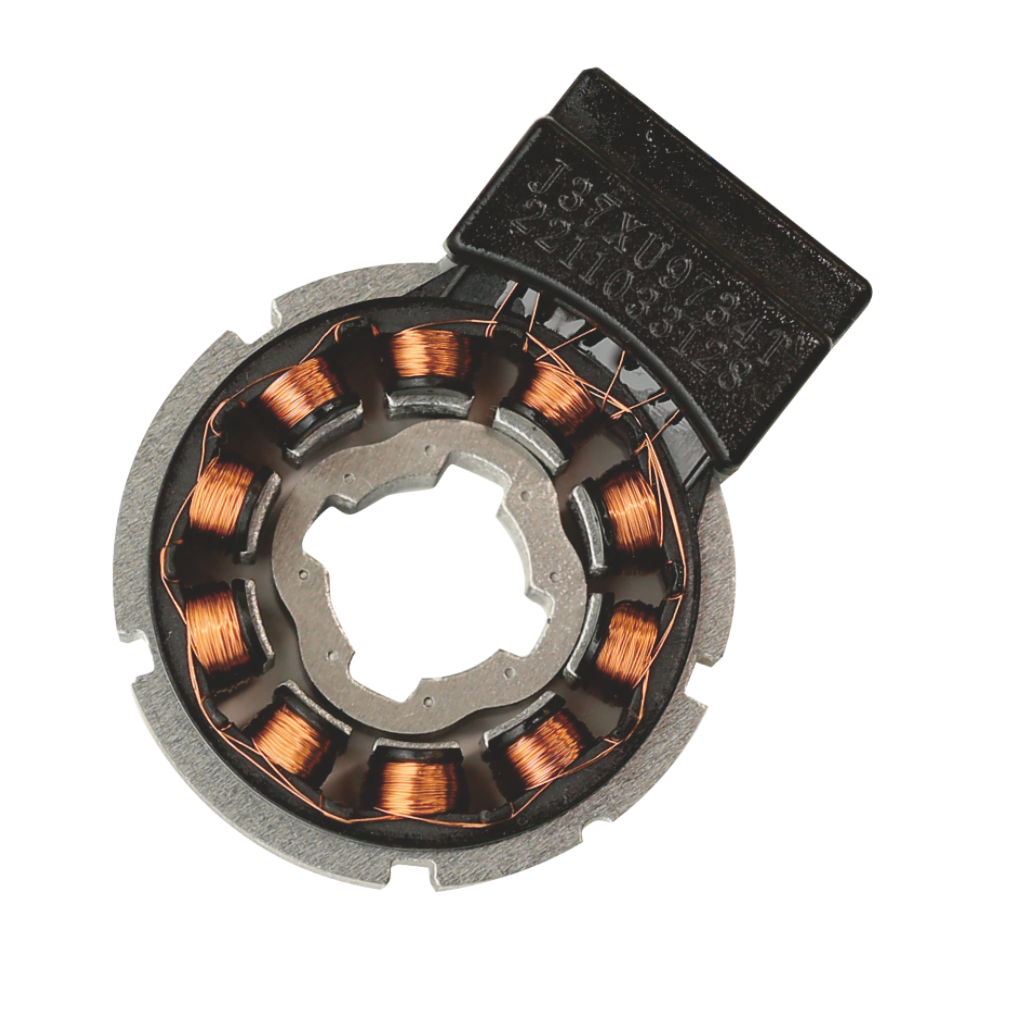
Tööpõhimõte
Muutuva reluktantsi lahendaja töö põhineb ruumilise õhupilu läbilaskvuse muutumisel, kui rootor pöörleb staatori suhtes. Iga läbilaskvuse muutuse tsükkel vastab rootori sammu pöörlemisele ja iga pöördega toimub mitu tsüklit. Need muutused õhupilu läbilaskvuses põhjustavad sisend- ja väljundmähiste vastastikuse induktiivsuse erinevusi, mille tulemuseks on indutseeritud potentsiaalsed muutused väljundmähises.
Eelised
Ühendustrafot, harja ega kontaktstruktuuri pole vaja.
Lihtne ehitus, madalad kulud ja minimaalsed keskkonnanõuded.
Hõlbustab ülekandesüsteemi hõlpsat integreerimist.
Ideaalne mootori- ja CNC-süsteemide ülitäpse juhtimise jaoks.
Rakendused
Muutuva vastumeelsuse lahendaja sobib eriti hästi rakenduste jaoks, mis nõuavad ülitäpset nurgaasendi tuvastamist. Seda kasutatakse laialdaselt:
Auto elektrooniline roolivõimendi (EPS)
Elektrisõidukid
Kaevandusmasinad
Kiirraudteesüsteemid