ຕົວກໍານົດການຕົ້ນຕໍ
| ຕົວແບບ |
J37XU9732T |
J37XU9733T |
J37XU9734T |
| ຄູ່ Pole |
2 |
3 |
4 |
| ແຮງດັນຂາເຂົ້າ |
AC 7 Vrms |
AC 7 Vrms |
AC 7 Vrms |
| ຄວາມຖີ່ຂອງການປ້ອນຂໍ້ມູນ |
10000 Hz |
10000 Hz |
10000 Hz |
| ອັດຕາສ່ວນການປ່ຽນແປງ |
0.286 ± 10% |
0.286 ± 10% |
0.286 ± 10% |
| ຄວາມຖືກຕ້ອງ |
≤ ± 60' |
≤ ± 40' |
≤ ±30' |
| ການປ່ຽນແປງໄລຍະ |
TBD |
TBD |
-14° ± 5° |
| ຄວາມເຂັ້ມແຂງ Dielectric |
AC 500 Vrms 1 ວິນາທີ |
| ຄວາມຕ້ານທານ insulation |
250 MΩ ນທ |
| Rotor ເສັ້ນຜ່າສູນກາງພາຍໃນ |
9.52 ມມ |
9.52 ມມ |
12 ມມ |
| Wire Cross Sectional Area |
0.35 ມມ |
0.35 ມມ |
0.35 ມມ |
| ຄວາມໄວການຫມຸນສູງສຸດ |
30000 rpm |
30000 rpm |
30000 rpm |
| ຊ່ວງອຸນຫະພູມປະຕິບັດການ |
-40 ℃ ກັບ +155 ℃ |
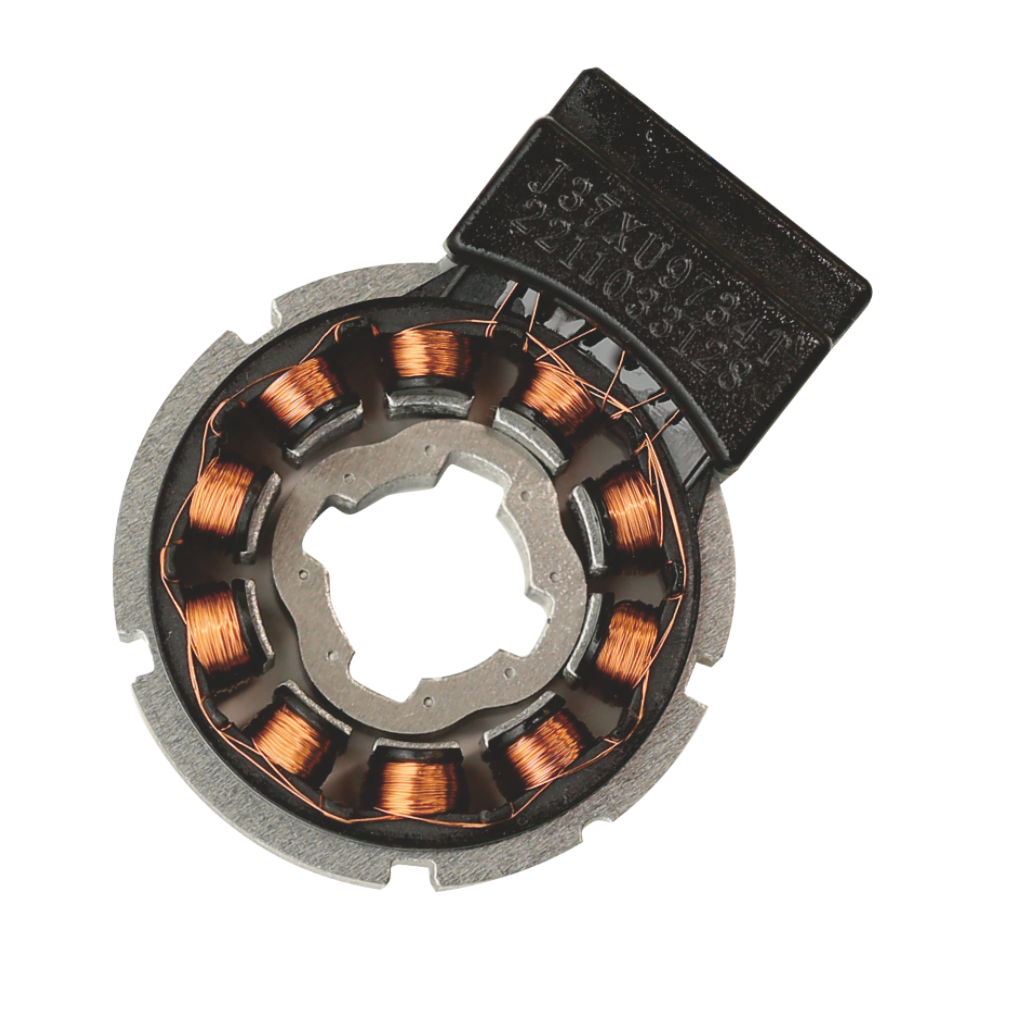
ຫຼັກການການເຮັດວຽກ
ການດໍາເນີນງານຂອງຕົວແກ້ໄຂຄວາມລັງເລທີ່ປ່ຽນແປງໄດ້ແມ່ນອີງໃສ່ການປ່ຽນແປງຂອງຊ່ອງຫວ່າງອາກາດທາງກວ້າງຂອງອາກາດຍ້ອນວ່າ rotor rotates ທຽບກັບ stator. ແຕ່ລະວົງຈອນຂອງການປ່ຽນແປງ permeability ກົງກັນກັບການຫມຸນ pitch ຂອງ rotor, ແລະຮອບວຽນຫຼາຍເກີດຂຶ້ນກັບແຕ່ລະການປະຕິວັດ. ການປ່ຽນແປງເຫຼົ່ານີ້ໃນ permeability ຊ່ອງຫວ່າງອາກາດນໍາໄປສູ່ການປ່ຽນແປງຂອງ inductance ເຊິ່ງກັນແລະກັນລະຫວ່າງ input ແລະ output windings, ສົ່ງຜົນໃຫ້ induced ການປ່ຽນແປງທີ່ມີທ່າແຮງໃນ winding ຜົນຜະລິດ.
ຂໍ້ດີ
ບໍ່ມີການຫັນປ່ຽນ coupling, ແປງ, ຫຼືໂຄງສ້າງການຕິດຕໍ່ທີ່ຕ້ອງການ.
ການກໍ່ສ້າງງ່າຍດາຍ, ຄ່າໃຊ້ຈ່າຍຕ່ໍາ, ແລະຄວາມຕ້ອງການດ້ານສິ່ງແວດລ້ອມຫນ້ອຍ.
ອໍານວຍຄວາມສະດວກໃນການເຊື່ອມໂຍງລະບົບສາຍສົ່ງໄດ້ງ່າຍ.
ເຫມາະສໍາລັບການຄວບຄຸມຄວາມແມ່ນຍໍາສູງໃນລະບົບມໍເຕີແລະ CNC.
ຄໍາຮ້ອງສະຫມັກ
ຕົວແກ້ໄຂຄວາມລັງເລຂອງຕົວແປແມ່ນ ເໝາະ ສົມທີ່ສຸດໂດຍສະເພາະກັບແອັບພລິເຄຊັນທີ່ຕ້ອງການການຮັບຮູ້ຕໍາແຫນ່ງມຸມທີ່ມີຄວາມແມ່ນຍໍາສູງ. ມັນຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນ:
ພວງມາໄລໄຟຟ້າໃນລົດຍົນ (EPS)
ພາຫະນະໄຟຟ້າ
ເຄື່ອງຈັກຂຸດຄົ້ນບໍ່ແຮ່
ລະບົບລົດໄຟຄວາມໄວສູງ